- 摘要:
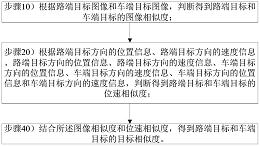
本发明提供一种适用于车路协同感知系统的目标一致性判别方法,包括以下步骤:步骤10)根据路端目标图像和车端目标图像,判断得到路端目标和车端目标的图像相似度;步骤20)根据路端目标X方向的位置信息、路端目标X方向的速度信息、路端目标Y方向的位置信息、路端目标Y方向的速度信息、车端目标X方向的位置信息、车端目标X方向的速度信息、车端目标Y方向的位置信息和车端目标Y方向的速度信息,判断得到路端目标和车端目标的位速相似度;步骤40)结合图像相似度和位速相似度,得到路端目标和车端目标的目标相似度。本发明适用于车路协同感知系统的目标一致性判别方法,能够得到路端感知目标和车端感知目标的目标相似度,得到的目标相似度精度高。