- 摘要:
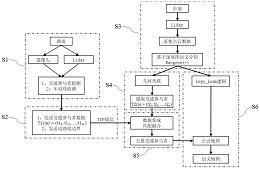
本发明公开了一种基于车路协同感知系统的语义地图构建方法,涉及智能驾驶技术领域,解决了无人驾驶技术中单车感知范围较小语义地图误差较大的技术问题,其技术方案要点是利用车路协同感知的思想将车端和路侧感知设备检测的交通参与者数据进行匹配融合;利用RangeNet++网络对点云进行语义分割,再通过LeGO‑LOAM算法建立点云地图。对道路全量交通参与者进行检测识别,不仅能够为单车实时构建点云语义地图,还能够融合各车的点云语义地图形成大范围的语义地图,供区域内行驶的所有车辆使用,有较好的应用前景,且该方法所构建的地图算法结构简单,语义信息丰富,建图范围大,误差小,且具有较强的鲁棒性。