- 摘要:
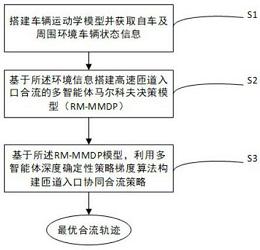
本发明公开了一种车辆匝道入口合流控制方法、车辆、电子设备及存储介质,其中车辆匝道入口合流控制方法,包括以下步骤:获取环境车辆的状态信息:包括位置、速度及加速度;搭建高速匝道入口合流场景的多智能体马尔科夫决策模型;利用多智能体深度确定性策略梯度算法构建匝道入口协同合流策略,以求解包含横向碰撞安全、纵向碰撞安全、整车能耗最小及通行时间最短的多目标优化问题,从而得到最优合流轨迹。本发明将多智能体深度强化学习算法应用于匝道入口协同合流控制中,使得面向高动态高随机的匝道入口合流场景时达到协同合流的能耗最低,通行时间最短。