- 摘要:
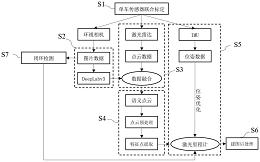
本发明公开了一种基于激光与视觉融合的语义地图构建方法,涉及无人驾驶SLAM技术领域,解决了无人驾驶技术中大规模闭环检测鲁棒性差和构建点云地图缺失语义信息的技术问题,其技术方案要点是利用环视摄像头模组采集周围环境的图片数据,再将图片传入到DeepLabv3+网络进行语义分割,再利用相机和激光雷达之间的投影关系,将图片中的语义信息投影到点云上构建语义点云地图,运用语义信息改进LeGO‑LOAM算法达到优化定位建图的目的,还能够利用图片数据进行运用CALC无监督学习网络进行闭环检测来优化矫正位姿,提高SLAM系统的鲁棒性。该方法所构建的地图能够实现大规模建图,语义信息丰富,有较强的鲁棒性。