- 摘要:
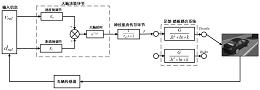
本发明涉及一种考虑纵向跟车行为的驾驶行为模型的参数辨识方法,驾驶行为模型以自车与前车的相对距离和相对速度作为输入,驾驶员对踏板操纵行为作为中间变量,踏板角度作为输出,考虑了人类驾驶员在半自动/自动驾驶车辆行驶中的纵向操纵作用,利用大脑决策行为、神经肌肉信号传导过程和足部与踏板耦合执行过程来表征纵向操纵行为。辨识方法基于递推最小二乘法的辨识模型对驾驶行为模型的状态参数进行辨识。本发明能准确描述驾驶员的纵向跟车状态下的行为特性,并高效的求解模型中的时变参数,从而准确地获得驾驶员在操纵车辆过程中的动态特性变化。可广泛应用于考虑驾驶员纵向行为的个性化辅助控制系统的研究和应用中。