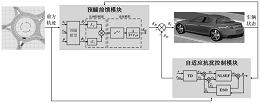
本发明公开了一种自动驾驶汽车路径跟踪的类人控制策略,涉及自动驾驶技术领域,解决了类人驾驶对未知环境的适应性较差且其自动控制器鲁棒性不强的技术问题,其技术方案要点是该控制策略通过控制器实现,该控制器包括预瞄前馈模块和自适应抗扰控制模块,预瞄前馈模块以前方道路信息为输入,模拟驾驶员对前方道路的转向行为决策和控制行为,以二阶系统的比例控制输出前馈转向角;自适应抗扰控制模块以车辆横摆角速度误差作为输入,模拟驾驶员的补偿和调整行为,为前馈输入提供补偿转向角,同时增强控制策略的鲁棒性。该方法能够在路径跟踪控制中实现类人驾驶效果,在高效、平稳的跟踪控制的同时保证了乘员舒适性,提升了自动驾驶系统接受度。
摘要: