- 摘要:
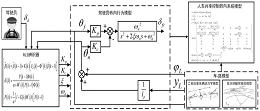
本发明提出了时变人车共享转向控制系统及驾驶特性参数辨识方法,由道路曲率和车辆横向误差、航向误差建立远、近预瞄点描述驾驶员的视觉角度;然后考虑驾驶员的预瞄行为、补偿行为和神经肌肉响应行为,提出了描述驾驶员转向操纵过程的二阶系统;在此基础上,结合二自由度车辆动力学模型构建了时变人车系统共享转向控制行为模型;最后建立了基于递推最小二乘法的系统参数辨识模型,对人车共享转向控制系统中的驾驶员特征参数进行辨识。本发明所提出的驾驶员模型和辨识方法能够准确的描述驾驶员依据道路信息的转向操纵行为特性,并高效的求解模型中的时变参数,在考虑驾驶员转向行为特征进行人车协作共享控制,具有实用性。