- 摘要:
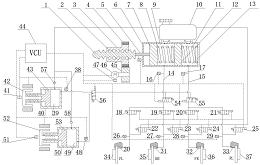
本发明涉及一种双冗余线控制动系统及方法,系统包括:液压源模块,包括具有两个工作腔的制动主缸总成、具有一个工作腔的第一制动副缸总成和第二副缸总成,分别由各自的电机驱动实现工作腔建压;四轮制动模块,包括两组制动轮缸;液压源切换模块,包括切换电磁阀,用于连接液压源模块和四轮制动模块;控制模块,包括压力传感器,用于采集各液压管路和工作腔内的压力,电机转速传感器,用于采集电机转速信号,整车控制器,与压力传感器、电机转速传感器、各电磁阀及各电机信号连接,进行液压源切换控制,实现正常制动、冗余制动或双冗余制动。本发明解决了现有线控制动方案无法满足无人驾驶汽车制动需求的问题。