
- 摘要:
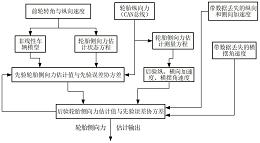
本发明涉及一种考虑传感器数据丢失的线控汽车轮胎侧向力估计方法,首先利用电动汽车车载传感器获得带有部分测量数据丢失的前轮转角,纵向速度,质心侧偏角以及纵、横向加速度信号,利用线控系统中CAN总线获得轮胎的纵向驱动力信息,将这些信息与非线性车辆模型结合利用先验预估和后验更新的方法估计轮胎侧向力,实现轮胎侧向力的精确获取。本发明可以填补当前传感器数据丢失情况下轮胎力无法估计的技术空白,促进了汽车主动安全控制技术的发展
本发明涉及一种考虑传感器数据丢失的线控汽车轮胎侧向力估计方法,首先利用电动汽车车载传感器获得带有部分测量数据丢失的前轮转角,纵向速度,质心侧偏角以及纵、横向加速度信号,利用线控系统中CAN总线获得轮胎的纵向驱动力信息,将这些信息与非线性车辆模型结合利用先验预估和后验更新的方法估计轮胎侧向力,实现轮胎侧向力的精确获取。本发明可以填补当前传感器数据丢失情况下轮胎力无法估计的技术空白,促进了汽车主动安全控制技术的发展