发布者:高天阳发布时间:2023-07-18浏览次数:371
研究中心聚焦车辆系统动力学与控制,围绕车辆系统耦合动态建模与全状态参数估计、车辆失稳机理与瞬态操稳控制、复杂车辆群体交互机制与多车稳定协同控制等科学问题,提出基于事件流序列分割机理的车辆动态建模方法,设计时滞补偿、噪声抑制的车辆全状态参数估计算法,揭示了车辆系统零解渐近稳定机制,提出基于多agent的底盘多执行器动态协调控制架构,构建车-路-网一体化的广义车辆系统动力学理论。
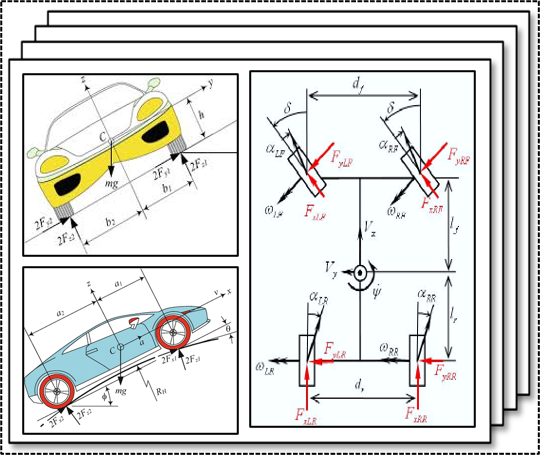
图1:车辆多模型集
图2:车辆失稳机理
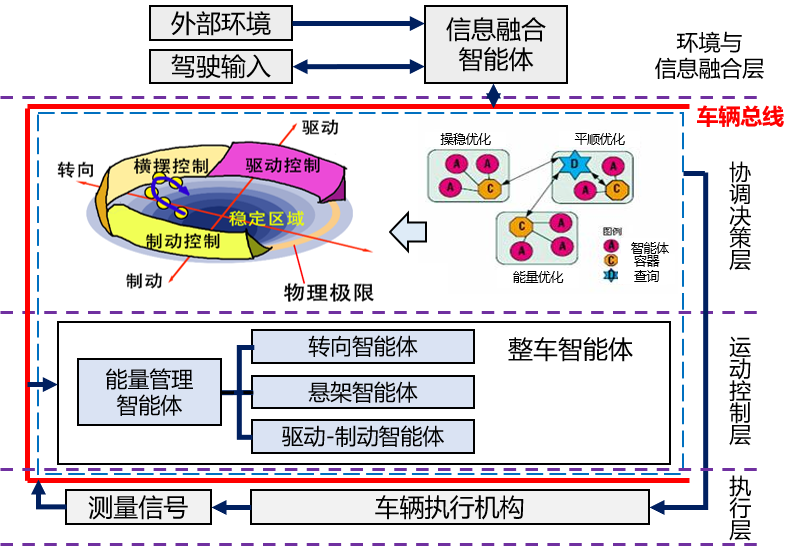
图3:动态协调集成架构